
Life at HTIC: The place I started to learn things.
IntroPermalink
HTIC is a healthcare research lab inside IIT Research park. I have joined Team SSR(spine surgical robotics) as a final-year intern. I have worked for almost a year and a half over here as a robotic engineer. The lab is run by professor Dr. Mohanasankar Sivaprakasam. When I go to the lab, I see a lot of unique minds wanting to do something different.
Professional LifePermalink
I was working all the time, under the guidance of an MS Scholar named Shyam A. The perk I got working in the team is the flexibility to learn something new in the first couple of months. I always had a soft corner for healthcare applications and products. So I was working on Sundays, back in those days. During the first couple of months, I got to learn about working in ROS and packages along with it(MoveIt, FastIK, RViz). This is like full-time things, which is so exciting to see you working robotics in simulation and stuff.
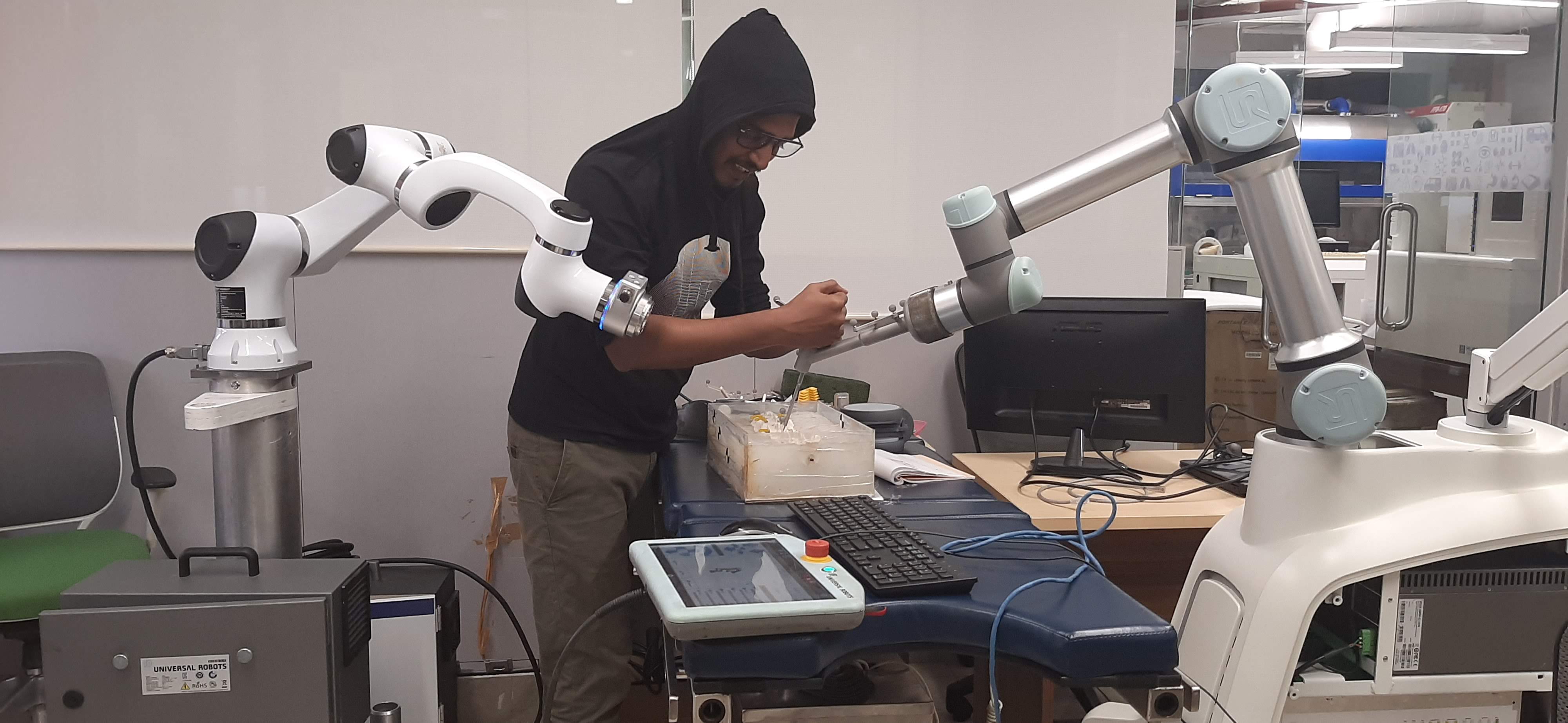
The perk of being in the office and working is you can start moving with the real robot. I have personally worked with 4 different robots, namely, Elfin, UR, KUKA, and Staubli. I have worked with both Cobot and Industrial robots. The company has enough funds to bring in and spend on new robots, It doesn’t purchase all of them, but the company rents them. Yet a few robots, the company owns it.
So after working with robots for 6 months, I started digging into the application part. I was given the task to design the motion planning of the robot for spine surgical application. We already have a motion planning code, but we wanted it to be fast and the code to be feasible to adopt for more robots.
 |
|---|
| Robots in HTIC(2021). |
 |
|---|
| Me and Shashank in love with robots(2016). |
Building the core productPermalink
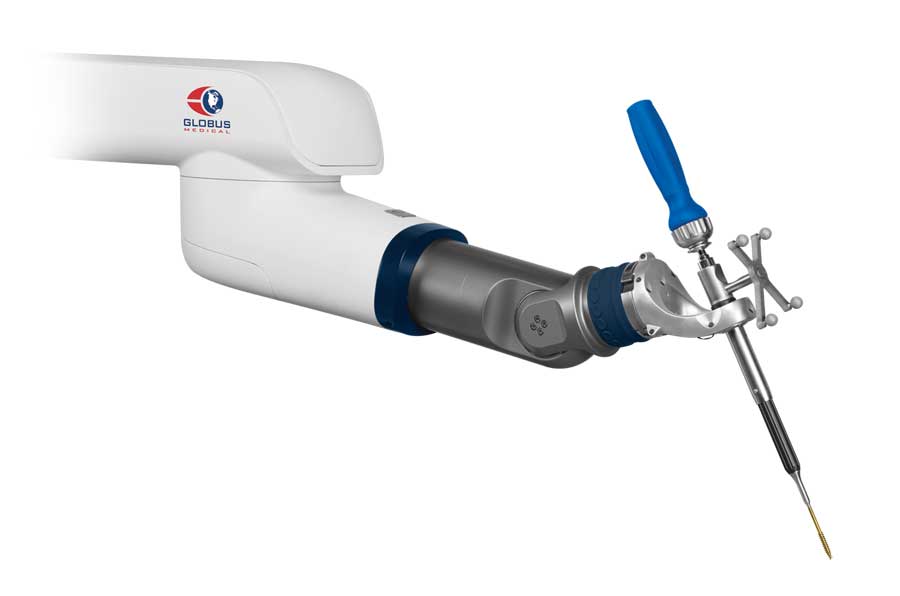
The application is simple, imagine drilling a needle into the wall with a bare hand. you see the needle can tumble and go in the wrong direction. Here doctors do the same thing but in the spinal cord. Since the spine is connected to the brain, if the needle insertion is not accurate, things go bad. Imagine you have a holder like an extra arm to hold the screwdriver, all you need is to rotate it. The one which holds the driver is the robot here. This is what the robot does, simply comes and holds the screwdriver for the doctor.
 |
|---|
| Robot holding the tool to drill the pedicle screw into the vertebrae. |
Take a clean look at the picture, seems simple right, but not, one major enemy is collision during planning, we do not have a lot of cams, around, and the robot should plan the trajectory using IR markers. Collision include
- Robot - Needles on the body
- Robot - Robot
- Robot - Doctor
- Robot - Patient
We need to track all of them and do motion planning, so we built software that can replicate the real-time simulation inside RViz and used the collision libraries to check. We have checked the collisions and they made proper collision-free trajectories. I have helped my peer Aswath Govid, to write motion planning software.
 |
|---|
| The surgical site, have look around the room. |
Even though I was working with really good robots and people around, somewhere deep down I wanted to work with Images and Neural Nets. Whenever someone says it the desire to work with it grew stronger, right at that moment I got an opportunity to work with Detect Tech as a CV-Deep Learning Engineer-I.
KUKA CompetitionPermalink
We have applied for one of the world’s best robotic competitions, the annual KUKA robotics competition. We are one of the top 5 finalists in the end.
ExpoPermalink
I have gone to an expo, to check out what other robotic companies are up to.
|  |
|:–:|
| Robotics Expo. |
|
|:–:|
| Robotics Expo. |
Personal LifePermalink
Along with software engineers, there is a mechanical team and an imaging team. My peers in those teams are so good to me and took good care of me when I needed them. A special thanks to Nivas and Pradeep.
Being my first job, the people are of various ages, when I joined, I was the youngest. So all my peers who are elder than me took responsibility to teach all the things.
When it comes to professional things, Shyam is a good mentor, but Minhas was the one who taught me all the other stuff. Dear Minhas, as your disciple, I forever owe you. Thank you for all your teachings.
 |
|---|
| Anthony, Me, Nivas, Minhas, Aswath(top photo). The only people you need to make life happier. |
 |
|---|
| You gotta party when you are in the world’s top 5. |